日本、世界初のピンポイント月面着陸目指す!
世界初のピンポイント月面着陸、成功するか?
 |
| 日本の月面着陸機スリム(写真提供:JAXA) |
世界初のピンポイントで月面着陸を目指す、日本の月着陸機スリムが6月4日に種子島で報道陣に公開(^^♪!
 |
| 日本の月面着陸機スリム(写真提供:JAXA) |
今まで月面着陸誤差は目標地の数km~数十km、
随分、誤差があったのですね。東京駅を目標地にした場合、品川駅に着陸したり酷い場合は横浜駅なんて事もあったのですね。それでも着地成功だったんです。
それを、日本は百m以内を目指す。つまり世界初のピンポイントで月面着陸を目指すのです。
是非とも頑張って欲しいですね!
 |
| 日本の月面着陸機スリム(写真提供:JAXA) |
月面着陸が成功すれば世界で4番目、誤差百m以内のピンポイント着陸は世界初。
日本の月面着陸機スリムは、月探査機かぐやの映像地図を持っており、カメラで捉えた映像とを顔認識システムの技術を使って照合することで世界初のピンポイントで月面着陸を目指す(^^♪!
8月以降の打上げなので、月軌道に入るのに数ヶ月かかり、年末から多分・今度の冬季の間には着陸予定です。
 |
| スリムの着陸 (写真提供:JAXA) |
月面着陸は日本三度目の正直、成功祈願☺!
 |
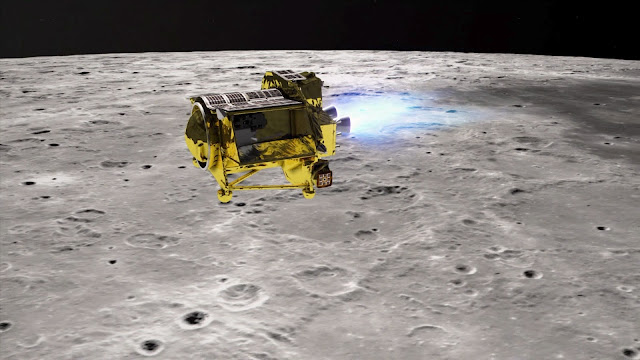
| 月面へ着陸したスリム(写真提供:JAXA) |
参考:着陸シーケンス(JAXA資料より)
次の図は月面着陸機スリムの着陸方法。
図の通り月面着陸機スリムは、月周回軌道から15kmまで高度を下げて着陸シーケンスに入り、その後20~30分で月面にピンポイントでの着陸を目指します。
着陸シーケンス開始前 : 月周回楕円 600km × 15km
シーケンス開始前・月周回楕円軌道において、地上からSLIMの軌道・位置を決定し、SLIMに通知します。その情報をもとに、SLIMは高度15kmの地点(近月点)でメインエンジンの逆噴射(探査機進行方向とは逆方向に噴射)を開始し、着陸シーケンスに移行します。
動力降下フェーズ : 高度 15km→3.5km
着陸シーケンスのひとつ目は動力降下フェーズです。動力降下フェーズ中には、開始・終了時を含めて合計4回、約50秒間の「コースティング」期間を設け、その間はSLIMに搭載したカメラが月面搭載となるように姿勢を調整します。コースティング期間中に、カメラで月表面を撮影、その画像から自分がいる位置・速度を高精度に推定し、併せて、着陸点へ向かう軌道の再設計を搭載計算機上で行います。
SLIMはこのような自動制御により着陸地点の上空に到達します。
 |
| 月面着陸機スリムの着陸方法(写真提供:JAXA) 垂直降下フェーズ : 高度 3.5km → 0m SLIMは着陸地点の上空に到達後、着陸レーダにより高度を検出しながらほぼ垂直に降下します。 障害物検知 : 高度 約50m 垂直降下フェーズの途中、ある高度(例えば約300m)において「障害物検知」を実施し、探査機直下の障害物の状況に応じて水平位置の微調整を行います。 メインエンジンをカットオフ : 高度 約3m 月面近く(例えば高度約3m)に達した時点でメインエンジンをカットオフし、姿勢制御を行いつつ着陸します!!
クレータを使って自分の位置を知る 探査機自身が考える SLIMがピンポイント着陸する前には、月上空で自分の位置を正確に知る必要があります。 SLIMはカメラを月表面に向けて撮影した画像を処理してクレータを認識し、メモリにあらかじめ内蔵された月面の地図と照合することで、自身の位置を精度良く測定します。しかし、宇宙の過酷な環境できちんと使えるコンピュータは、どうしても地上で使われているコンピュータと比べると低い処理能力になってしまいます。そのため、SLIMでは専用の計算効率の高い画像処理アルゴリズムを開発し,精度と処理時間を両立させています。 |




コメント
コメントを投稿